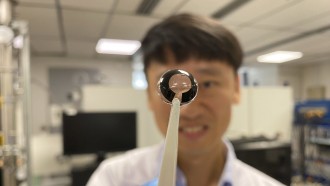
本-古里安大学的工程师声称,他们已经创造了一个最快的和最有效的两栖机器人称为“AmphiSAW”。
的机器人的年代运动水是仿照鳍的运动而运动蜈蚣后在陆地上的设计。

(照片:参会者/法新社通过盖蒂图片社)
一群、日本:这个组合图片显示了两栖蛇形机器人“ACM-R5(活跃的绳Mechanism-Revision5)”开发由东京理工学院教授Shigeo Hirose,使其能够间接的在地上,滑入水与螺旋运动新闻预览protptype机器人展览在2005年爱知世博会2005年5月10日在名古屋附近的一群镇。万博体育登录首页snake-shape机器人,配备一台摄像机,开发在残骸中找到受害者在日本地震等灾难。
一群、日本:这个组合图片显示了两栖蛇形机器人“ACM-R5(活跃的绳Mechanism-Revision5)”开发由东京理工学院教授Shigeo Hirose,使其能够间接的在地上,滑入水与螺旋运动新闻预览protptype机器人展览在2005年爱知世博会2005年5月10日在名古屋附近的一群镇。万博体育登录首页snake-shape机器人,配备一台摄像机,开发在残骸中找到受害者在日本地震等灾难。
搜救机器人
潜在的用途包括搜救机器人,特别是在发生洪水,海啸等自然灾害。
根据团队,机器人出门是否运行在陆地或在水中。他们证明了机器人可以游以每秒0.74身体长度(B / s)和1.5 B / s在陆地上爬行。
此外,它们可以配备前腿或车轮,加速其爬行速度,特别是在粗糙的地面。
“单电动机和贡献bioinspired设计机器人的效率和相对简单的设计意味着它是可伸缩的任何大小,”David Zarrouk博士内盖夫本-古里安大学的一位工程师,在解释道新闻发布会上的声明。
他的研究旨在创建机器人可以执行困难的动作而消耗能量来操作。
读也:十年美国宇航局月球探测器进行加压地面测试;这就是了解沙漠之鼠
起伏的运动
许多生物,从微尺度细菌中大尺度的脊椎动物,取决于一个波动前进陆地和大海。两栖动物如蝾螈和海蛇,特别是依赖于这种形式的运动。
波动可以使用游泳和爬但是只有几个机器人可以复制它,因为它需要许多关节的协调。
研究小组报告了一个新的简约方法的爬行和游泳基于波动在矢状平面(垂直)。因此,AmphiSAW当时开发的展示,在很多情况下这种方法。
可以提高机器人的性能通过添加腿或轮子前面,特别是当它爬在凹凸不平的地形。
连同它的快速度,机器人拥有最低的运输成本的所有两栖机器人研究的文献中描述。
团队的研究结果的报道文章题为“小说波爬行机器人具有良好的游泳能力”,出现在同行评议在2月7日的《生物灵感和仿生学》期刊上。
相关文章:机器人狗:“包助手”配备监视Technologyb但担忧是什么?万博体育登录首页

(照片:科技时代)万博体育登录首页
ⓒ2023 T万博体育登录首页ECHTIMES.com保留所有权利。不复制未经许可。